
如何给图形"涂色"
多边形的填充
前面我们讲了直线和圆的绘制,想必你现在已经可以绘制一些基础图形了。
但是,现在存在一个问题:我们绘制的都是线条,并不是我们平常看到的实心图形——缺少了颜色的填充。
这一篇文章,我将解释如何填充我们之前绘制的图形。
多边形的填充主要分为两种方式:
- 多边形的扫描转换:通过确定穿越区域的扫描线的覆盖区间来填充
- 区域填充:从给定的位置开始涂描直到指定的边界条件为止
在讨论算法之前,先区分两种多边形表示方式:
| 表示方式 | 定义 |
|---|---|
| 顶点表示 | 用多边形的顶点序列来刻划多边形 |
| 点阵表示 | 用位于多边形内的像素集合来刻划多边形 |
扫描转换多边形和区域填充,就是从顶点表示到点阵表示的转换过程。
多边形的扫描转换
x-扫描线算法
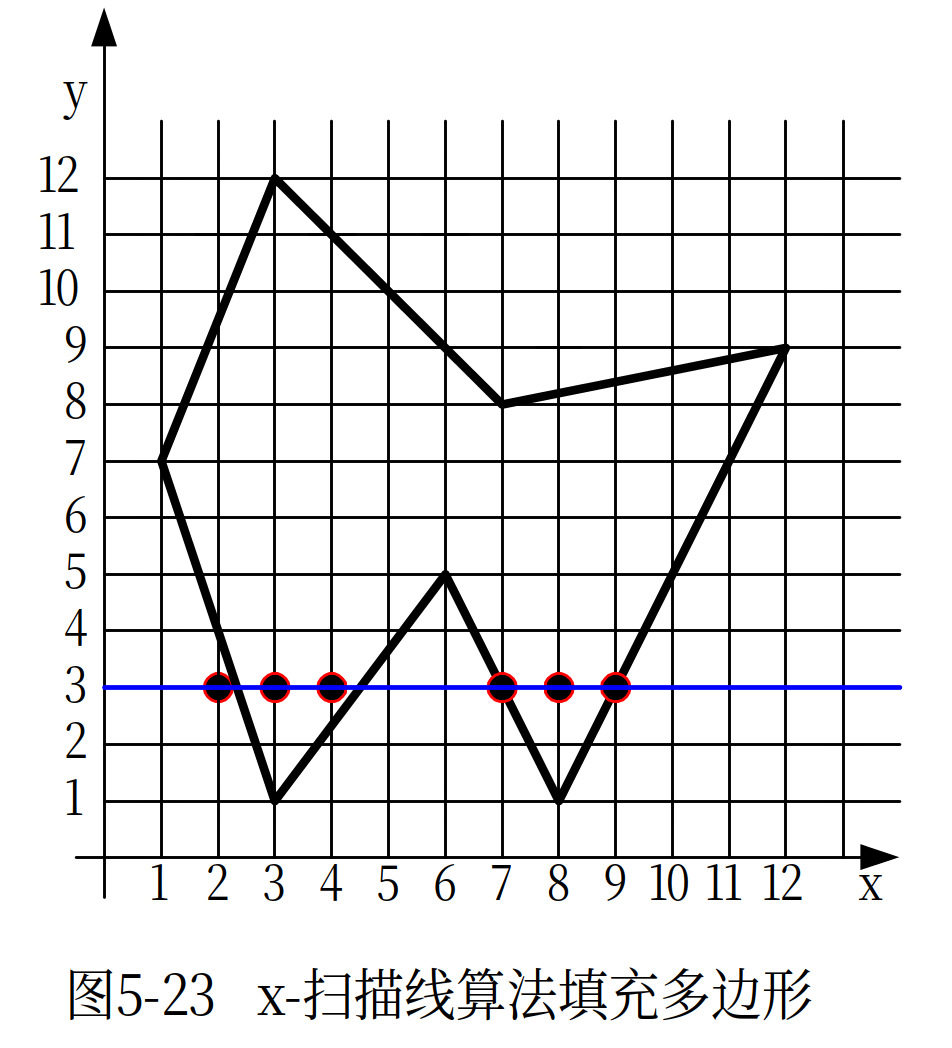
基本思想:用一条水平扫描线,从上到下扫描整个多边形,求出每一行的图形内部像素并填充。
算法步骤:
- 确定多边形所占有的最大扫描线数,得到多边形顶点的最小和最大 y 值(
ymin和ymax) - 从
y = ymin到y = ymax,每次用一条扫描线进行填充 - 对一条扫描线进行填充的过程分为四个步骤:
- a. 求交:计算扫描线与多边形各边的交点
- b. 排序:将所有交点按 x 坐标递增排序
- c. 交点配对:将排序后的交点两两配对(第 1 与第 2、第 3 与第 4……)
- d. 区间填色:在每一对交点之间填充像素
但是,算法现在还存在一个问题:
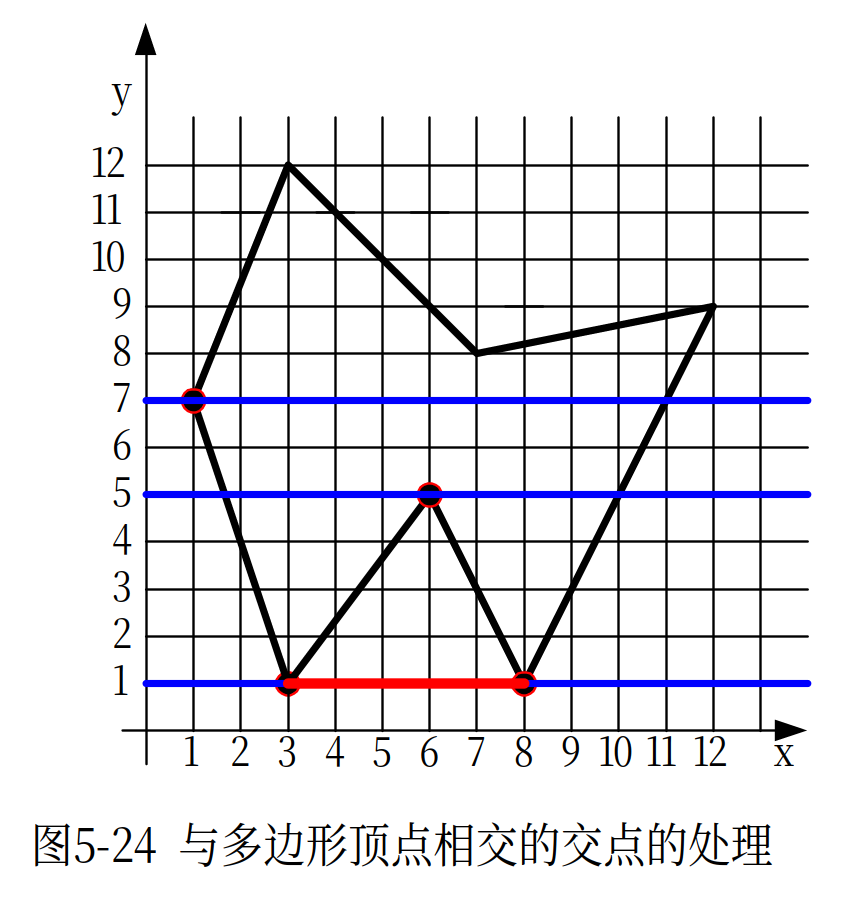
如图所示,当扫描线与多边形顶点相交时,我们需要决定交点的取舍。
为了解决这个问题,我们做出如下规定——当扫描线与多边形的顶点相交时:
- 若共享顶点的两条边分别落在扫描线的两边,交点只算一个
- 若共享顶点的两条边在扫描线的同一边,交点算作零个或两个
如下图所示:
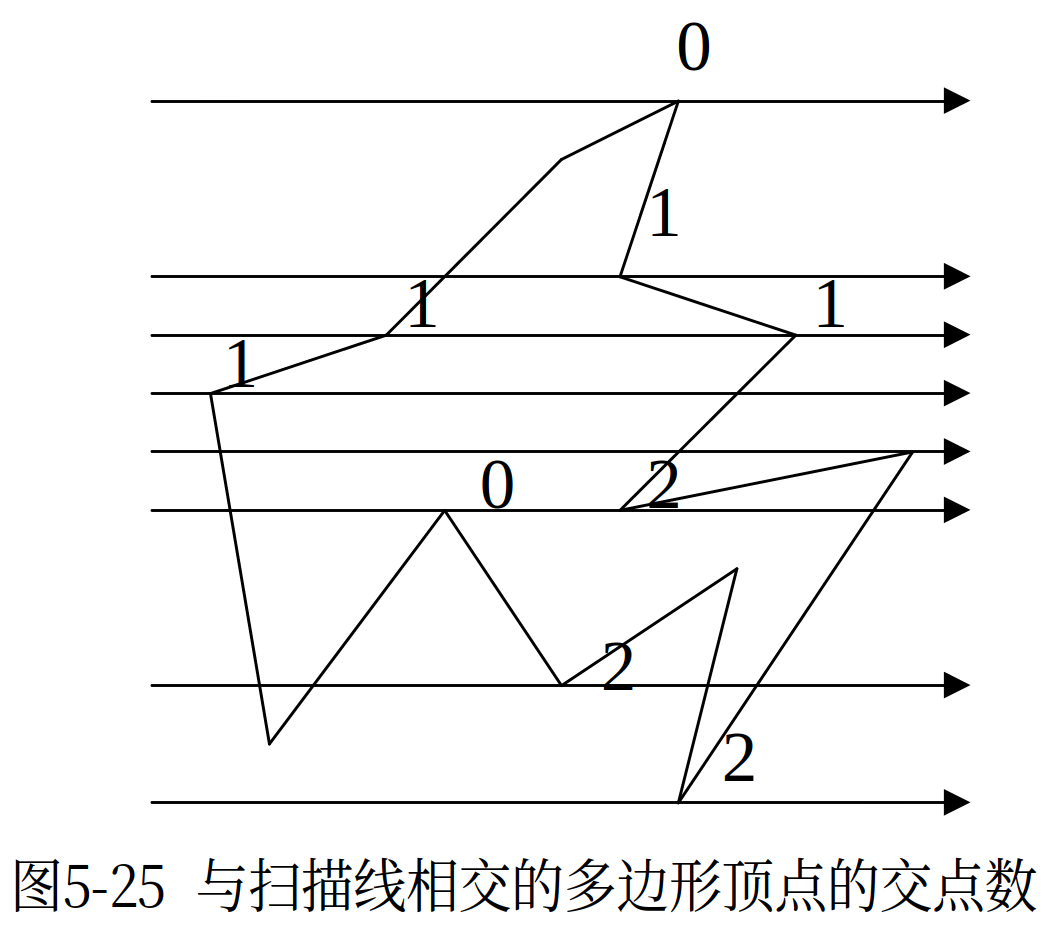
补充说明:第一种情况(异侧)是最常见的——顶点恰好是边的极值转折点,扫描线从一条边穿入、从另一条边穿出,交点只需算一次。第二种情况(同侧)出现在多边形的局部极值点(如尖顶或尖底),此时扫描线碰到顶点但没有穿越内部,所以算零个或两个交点以保持配对正确。
但是,扫描线算法存在效率问题:对于每一行扫描线,我们都要计算每一条边和扫描线的交点,即使这条边并没有和当前扫描线相交。边数多时开销很大。
下面,我们介绍一种基于扫描线算法的改进算法。
有效边表算法
改进原理
核心思想很简单:
- 处理一条扫描线时,仅对”有效边”求交——即与当前扫描线真正相交的边
- 利用扫描线的连贯性:相邻扫描线的交点可以通过简单增量计算,不需要重新解方程
- 利用多边形边的连贯性:一条边往往在连续多条扫描线中都有效
很多边在连续多条扫描线中一直有效,所以没必要每一行都遍历所有边,只需要维护当前活跃的边即可。
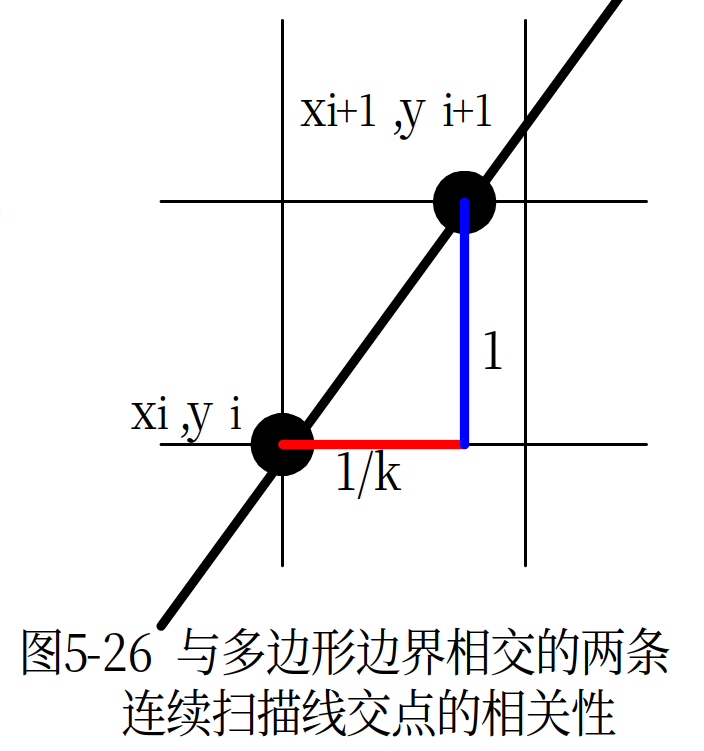
对于一条边,两次连续扫描前后,y 坐标增加 1,x 坐标增加一个固定量 dx = Δx / Δy。这利用了增量原理,和 Bresenham 的思想完全一样——用加法代替乘除。
数据结构
算法需要维护两个表:
| 表 | 全称 | 作用 |
|---|---|---|
| ET | Edge Table(边表) | 提前记录每条边从哪一行开始出现(ymin),避免每次扫描都遍历所有边 |
| AET | Active Edge Table(活性边表) | 动态维护当前扫描线有哪些活跃边,每次扫描后增量更新 |
每条边的数据结构:
1 | |
ET 的构造方式:
- ET 是一个以
ymin为索引的数组:ET[ymin]存储所有从该行”激活”的边 - 对于多边形的每条边,计算它的
ymin(较小 y 端点),将边节点插入ET[ymin]链表中 - 同一
ymin的边以链表方式存储
算法步骤
每一条扫描线的处理流程和扫描线算法基本一致,区别在于加入了对 ET 和 AET 的维护:
- 从 ET 加入新边:将
ET[y]中的边移入 AET - 删除结束边:从 AET 中移除
ymax == y的边(该边已失效) - 更新交点 x:AET 中每条边的
x += dx - 按 x 排序:对 AET 按当前 x 值重新排序
- 两两配对填充:相邻两交点配对,填充区间内的像素
注意:步骤 3 的更新发生在填充之后(为下一条扫描线准备 x 值)。新加入 AET 的边在加入时就已经携带了
y = ymin处的 x 值,所以当前扫描线的填充使用的是更新前的 x。
完整示例演练
下面我们用一个具体的五边形来完整走一遍算法流程,理解 ET 和 AET 如何协同工作。
示例多边形顶点:
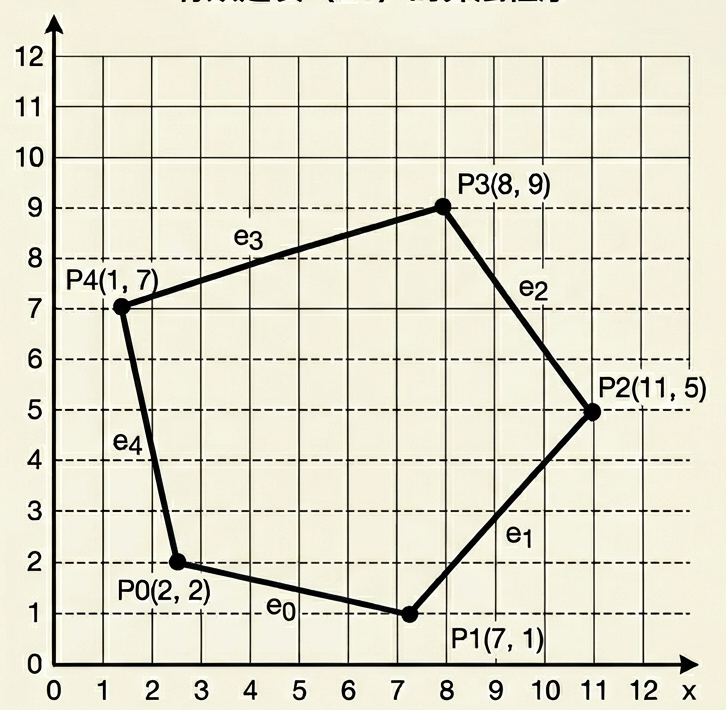
1 | |
第一步:构造 ET(边表)
将五条边分别处理,计算每条边的 ymin、ymax、x_ymin(在 ymin 处的 x 坐标)以及 dx:
| 边 | 端点 | ymin | ymax | x_ymin | dx = Δx/Δy |
|---|---|---|---|---|---|
| e4 | P4→P0: (1,7)→(2,2) | 2 | 7 | 2.00 | (1−2)/(7−2) = −0.20 |
| e0 | P0→P1: (2,2)→(7,1) | 1 | 2 | 7.00 | (2−7)/(2−1) = −5.00 |
| e1 | P1→P2: (7,1)→(11,5) | 1 | 5 | 7.00 | (11−7)/(5−1) = 1.00 |
| e2 | P2→P3: (11,5)→(8,9) | 5 | 9 | 11.00 | (8−11)/(9−5) = −0.75 |
| e3 | P3→P4: (8,9)→(1,7) | 7 | 9 | 1.00 | (8−1)/(9−7) = 3.50 |
dx的含义:dx = Δx/Δy,即 y 每增加 1,x 的变化量。dx > 0时边向右走,dx < 0时边向左走。
将边按 ymin 归类,得到 ET:
1 | |

第二步:逐扫描线遍历 AET
y = 1:
- ① 从 ET[1] 加入 e0、e1
- ② 删除
ymax == 1:无 - ③ AET = [e0(7.00), e1(7.00)],排序后不变
- ④ 配对填充:(7.00, 7.00),仅 x=7 一个像素(多边形底部尖点)
- ⑤ 更新为下一条扫描线:e0.x = 7.00−5.00 = 2.00,e1.x = 7.00+1.00 = 8.00
y = 2:
- ① 从 ET[2] 加入 e4(x=2.00)
- ② 删除
ymax == 2:e0 失效,移除 - ③ AET = [e4(2.00), e1(8.00)],排序后不变
- ④ 配对填充:区间 (2.00, 8.00),填充 x = 2~8 共 7 个像素
- ⑤ 更新:e4.x = 2.00−0.20 = 1.80,e1.x = 8.00+1.00 = 9.00
y = 3~4:无新边加入和删除,每行仅更新 x 后排序填充。
y = 5:
- ① 从 ET[5] 加入 e2(x=11.00)
- ② 删除
ymax == 5:e1 失效,移除 - ③ AET = [e4(1.40), e2(11.00)]
- ④ 配对填充:区间 (1.40, 11.00),填充 x = 2~11
- ⑤ 更新:e4.x = 1.40−0.20 = 1.20,e2.x = 11.00−0.75 = 10.25
y = 7:
- ① 从 ET[7] 加入 e3(x=1.00)
- ② 删除
ymax == 7:e4 失效,移除 - ③ AET = [e3(1.00), e2(9.50)]
- ④ 配对填充:区间 (1.00, 9.50),填充 x = 1~9
- ⑤ 更新:e3.x = 1.00+3.50 = 4.50,e2.x = 9.50−0.75 = 8.75
y = 9:
- ① 从 ET[9] 加入:无
- ② 删除
ymax == 9:e2、e3 均失效 - ③ AET 变为空,算法结束
将所有扫描线的填充区间汇总如下:
| y | AET 中的边 (排序后) | 填充区间 | 说明 |
|---|---|---|---|
| 1 | e0(7.00), e1(7.00) | x=7 | 底部尖点,顶点处两交点重合 |
| 2 | e4(2.00), e1(8.00) | x=2~8 | 新边 e4 激活 |
| 3 | e4(1.80), e1(9.00) | x=2~9 | 纯增量更新 |
| 4 | e4(1.60), e1(10.00) | x=2~10 | 纯增量更新 |
| 5 | e4(1.40), e2(11.00) | x=2~11 | e1 换为 e2 |
| 6 | e4(1.20), e2(10.25) | x=2~10 | 纯增量更新 |
| 7 | e3(1.00), e2(9.50) | x=1~9 | e4 换为 e3 |
| 8 | e3(4.50), e2(8.75) | x=5~8 | 纯增量更新 |
| 9 | —(AET 已清空) | — | 算法结束 |
区域填充
区域是指已经表示成点阵形式的填充图形,它是像素的集合。与扫描转换从”顶点表示”出发不同,区域填充从”点阵表示”出发,在区域内改变像素颜色。
4-邻接点与 8-邻接点
在区域填充中,”相邻”的定义决定了扩散的方向和范围:
![]()
| 邻接类型 | 相邻像素位置 | 特点 |
|---|---|---|
| 4-邻接 | 上、下、左、右 | 仅四方向连通,边界更”厚”,填充不会穿过对角线缝隙 |
| 8-邻接 | 上、下、左、右、四角 | 八方向连通,填充更流畅,但可能从对角线缝隙”泄漏” |
选择哪种邻接方式取决于边界定义:4-连通边界需配合 8-连通填充(反之亦然),否则可能出现填充越界。
边界填充算法(Boundary-fill Algorithm)
算法思想:从一个种子像素开始,只要相邻像素与边界颜色不一致,就不断向外扩散填充。
算法步骤:
- 选定一个种子点
(x, y),设定要填充的颜色和边界颜色 - 检查当前像素:如果它已经是边界颜色或已经填充过,则停止(递归终止条件)
- 将当前像素设为填充颜色
- 向四个(或八个)邻接方向递归重复步骤 2~3,直到所有连通区域被填满
洪水填充算法(Flood-fill Algorithm)
算法思想:从一个种子像素开始,只要相邻像素与目标颜色(待替换的旧颜色)一致,就继续扩散。与边界填充的区别在于:它不需要知道边界颜色,而是通过替换”同类颜色”来工作。
算法步骤:
- 选定一个种子点
(x, y),设定目标颜色(待替换的旧颜色)和填充颜色 - 检查当前像素:如果它不是目标颜色,则停止(递归终止条件)
- 将当前像素设为填充颜色
- 向四个(或八个)邻接方向递归重复步骤 2~3,直到所有同色区域被替换
| 对比 | 边界填充 | 洪水填充 |
|---|---|---|
| 停止条件 | 遇到边界颜色 | 遇到非目标颜色 |
| 需要知道的颜色 | 边界颜色 + 填充颜色 | 旧颜色 + 填充颜色 |
| 适用场景 | 已知边界色(如线框图) | 已知区域色(如位图色块) |
但是以上两种算法都存在一些明显的问题:
- 逐像素扩散太慢:每个像素都要递归,填充一个大矩形区域需要大量函数调用
- 递归/栈爆炸:递归深度等于区域面积,稍大的区域就会导致栈溢出
- 扩散路径混乱:像素被重复访问,缺乏空间连贯性的利用
下面介绍一种结合扫描线思想的优化算法。
扫描线种子填充算法
算法思想:不再”一个像素一个像素地扩散”,而是按水平扫描线整段填充。利用区域的像素连续性,一次性填完一整行,再将上下相邻行的未填充段入栈。
算法步骤:
- 将种子点
(x, y)压入栈 - 从栈中弹出一个点,从该点向右扩展,逐个像素填充直到碰到边界颜色,记录右边界
x_right - 从该点向左扩展,逐个像素填充直到碰到边界颜色,记录左边界
x_left - 当前行填充区间为
[x_left+1, x_right-1],一次性整段填完 - 检查上一行(
y-1)在区间内的像素,找到其中未填充的连续段,将每段的起始点压入栈 - 检查下一行(
y+1)同理,将未填充连续段的起始点压入栈 - 重复步骤 2~6,直到栈为空
和普通的递归填充算法相比,扫描线种子填充有质的提升:
| 对比维度 | 递归填充 | 扫描线种子填充 |
|---|---|---|
| 扩散方式 | 点扩散 | 线扩散(整行填充) |
| 栈操作次数 | 每个像素一次 | 每段水平区间一次 |
| 空间利用 | 无视连续性 | 利用空间连贯性 |
| 栈深度 | O(面积) | O(高度 × 复杂度) |
本质上是从”图遍历“升级为”区间扫描“。
多边形扫描转换与区域填充方法比较
联系
- 都是光栅图形面着色,用于真实感图形显示
- 可以相互转换:
- 扫描转换 → 区域填充:给定多边形内一点为种子点,用直线算法将多边形边界表示成八连通区域后,扫描转换问题转化为区域填充
- 区域填充 → 扫描转换:若已知多边形顶点,区域填充问题可转化为多边形扫描转换
区别
| 对比维度 | 多边形扫描转换 | 区域填充 |
|---|---|---|
| 基本思想 | 顶点表示 → 点阵表示 | 不改变表示方式,仅替换区域内颜色 |
| 边界要求 | 扫描线与边界交点个数为偶数即可 | 区域必须封闭,防止递归跨界 |
| 起始条件 | 从边界顶点信息出发 | 从区域内种子点出发 |
| 典型算法 | x-扫描线、有效边表 | 边界填充、洪水填充、扫描线种子填充 |
这次的插图来自画师画师JW